|
Ishir Roongta I'm a Masters student at Carnegie Mellon University studying Robotics and AI. I have prior experience in developing software stacks for perception, control, and autonomy (FSM, Behavior Trees) for mobile robots. Previously I completed my BTech in Electrical Engineering at the Indian Institute of Technology Kanpur. Reently I passed the FAA part 107 examination for small UAS pilots. |

|
Hire Me!I'm currently looking for full time roles (starting summer 2025) as a Robotics Engineer/Software Engineer/Deployment Engineer/... any role that involves building software stack for autonomous robots, integrating with hardware, iterative testing and deployment in the wild. Why Hire Me? |
Work ExperienceI've been fortunate enough to work with some amazing people during my internships. I'm a generalist in my skillset and have demonstrated my breadth at the following places: |
|
Software Engineering Intern - National Robotics Engineering Center
Manager: David Guttendorf Duration: May 2024 - August 2024
Reverse Engineered BlueTooth protocol of installed BMS to access battery status and radio mesh network of multiple UGVs using a module written in C++ based framework.
|
|
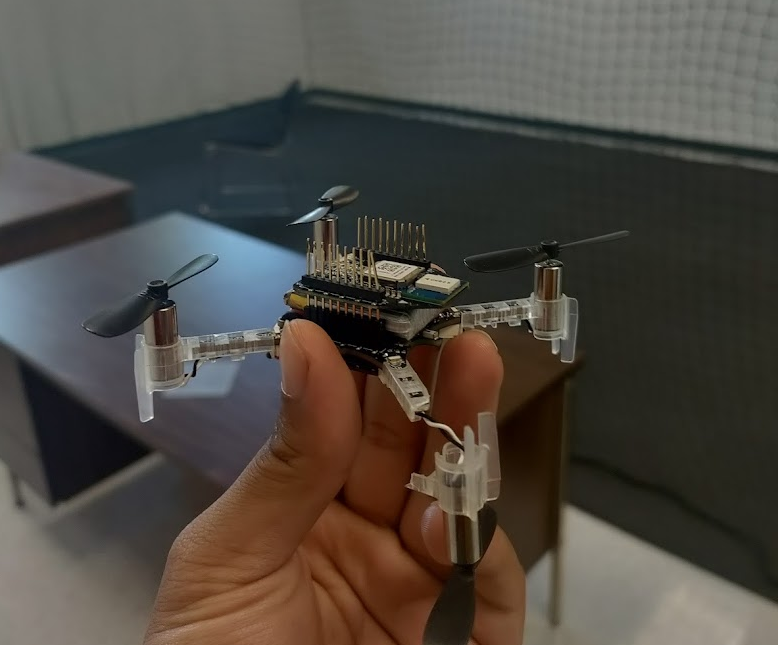
Research Intern - Université du Québec en Outaouais
Topic: Co-operative indoor localization of Crazyflies using Ultra-Wide Band sensor measurements. Supervisor: Prof. Soulaimane Berkane Duration: May 2022 - August 2022 Report | Setup Video | MATLAB code I was selected in the MITACS Globalink Research program as a research intern to work on the problem of indoor localization of a pair of drones using limited UWB ranging data. |
Projects & CompetitionsA list of key projects which helped me build foundational knowledge about robotic systems from simulating physcial attributes in Gazebo to deploying a full autonomy stack on a custom built aerial platform. I have worked on problem statements like autonomous obstacle avoidance, path planning, pure pursuit control, and exploration of unknown areas. |

|
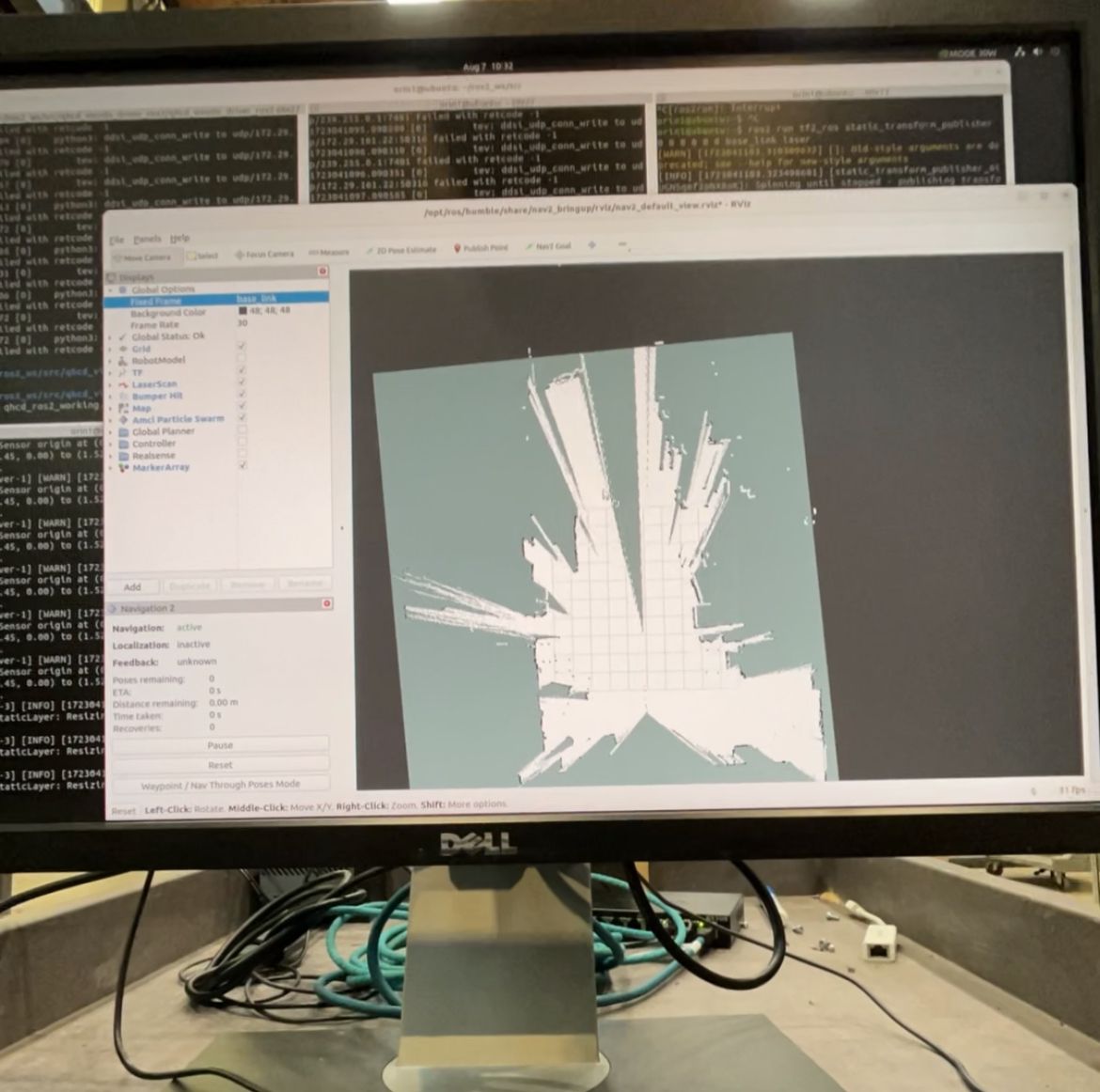
Wildfire Recon Drone : Resilient Sub-canopy UAV Navigation
Masters Capstone Project Sponsors: CMU AIRLab ( Prof. Sebastian Scherer, Andrew Jong [POC] ) Duration: November 2023 - November 2024 Website | Project Demo | Final Presentation | Full Report | Poster | GitHub An aerial platform capable of navigating in complete GPS denied environment (simulating sub-canopy conditions of a forest), obstacle avoidance (simulating avoidance of tree trunks), and autonomous exploration of an area to map out fire hotspots and relay video feed in realtime. |

|
F1Tenth : Autonomous Racing
Course Project Course Instructor: Prof. John Dolan Duration: January 2025 - May 2025 Code | Demo Video 1 | Demo Video 2 | F1Tenth Website Implementing and experimenting with autonomous driving algorithms involving reactive planners like gap following, graph-based planners like different flavours of RRT, predictive planners like Model Predictive Control (MPC), and learning-based end-to-end aproaches to generate control from LiDAR data. Task is simple: Go around a track as fast as possible! |
|
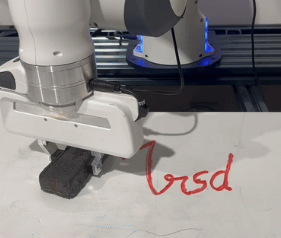
Franka-Stein : Autonomous Whiteboard Eraser using FRANKA Arm
Course Project (16-: Robot Autonomy) Course Instructor: Prof. Oliver Kromer Duration: February 2024 - April 2024 Project Video | Project Report | GitHub I worked on generating waypoints for the FRANKA arm by sampling appropraite points on the segmented image taken from a RS D435i camera. Post preliminary results, I implemented the Travelling Salesman Problem on sampled waypoints to generate efficient and smooth trajectory. |
|
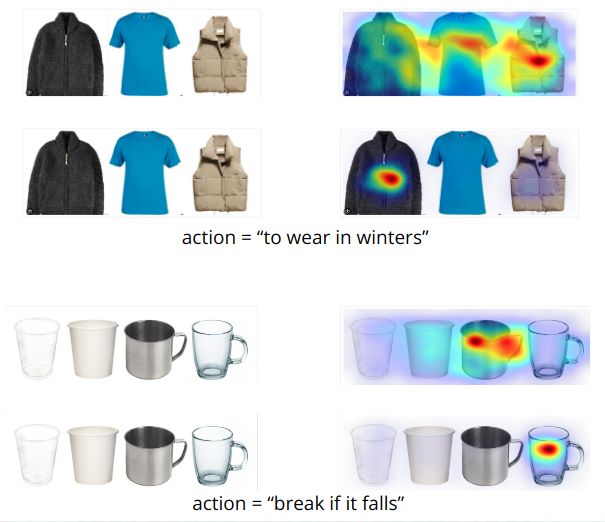
Context Aware Grasping
Course Project (16-: Visual Learning and Recognition) Course Instructor: Prof. Deepak Pathak Duration: February 2024 - April 2024 More of an exploratory project, we attempted to generate more appropriate grasp points/locations/zones for on object by queueing a VQA to describe the scene, an LLM to understand context of the request and the object, and VLM to suggest the contextually appropraite grasp location. |

|
UAV-Guided UGV Navigation Challenge
Inter-IIT Tech Meet 10.0 Team Head, Aeiral Robotics Team IITK Duration: February 2022 - April 2022 Project Video | Project Report | GitHub
Problem Statement: Map out rough waypoints of a mountainous road in summer conditions using a UAV, and then navigate a UGV with the help of an overhead UAV in winter conditions i.e road and mountain covered in snow.
|
|
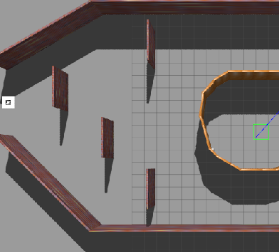
Vision Based Obstacle Avoidance
Inter-IIT Tech Meet 9.0 Senior Team Member, Aeiral Robotics Team IITK Duration: March 2021 - April 2021 Project Video | Project Report | GitHub Problem Statement: Navigate an unkown maze using a RGBD camera attached in front of the drone. At the end, land at a specific point using a Aruco marker. |

|
International Aerial Robotics Challenge
IARC - Mission 9 Junior Team Member, Aeiral Robotics Team IITK Duration: December 2020 - March 2021 Competition Website | GitHub
Problem Statement: An aerial platform capable of long distance transport of heavy equipment. The drone also performs removal and replacement of tightly-integrated heavy objects on a moving platform (moving ship).
|
Publications
|
|
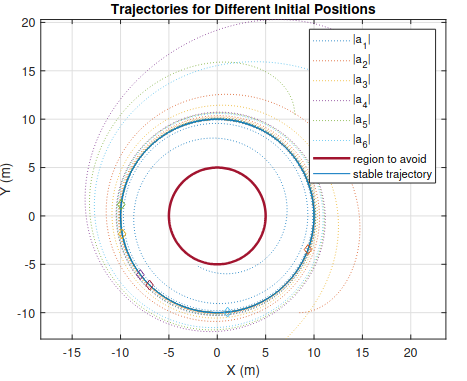
Trajectory-Constrained Standoff Target Tracking using Barrier Lyapunov Functions
AIAA SciTech 2023 Ishir Roongta, Piyush Kumar, Twinkle Tripathy We propose a novel control law using Control Barrier Functions to force a unicycle modeled particle to convergence around a target while imposing restrictions to it's orbit. We presented the work at the AIAA SciTech conference in January 2024 at Orlando, Florida. |
ResourcesThis will be a collection of resources for those after me. I hope you find some use in these, and If you want to correct/add/subtract something please hmu via email. |
Some HobbiesWell if you read this far, here's a little non-work related stuff about myself. I love landscape photography and you can find my stuff here: Instagram and YouTube My current gear is a beat-up Fuji XT200 with kit lens. I ocassionaly play the guitar as well. |
|
Last updated 18th January 2025. This template is taken from John Barron's website. |